Teleoperation of a Robotic Grabber for Personal Use via Internet – Kunikatsu Takase (Japan) with additional team members Hironobu Takahashi & Takashi Yoshimi
The robotic grabber invented by Kunikatsu and his team can be operated remotely by a caregiver to deliver objects to a patient’s bedside. It consists of an arm with three joints, two fingers, and a camera, all controlled by a Raspberry Pi computer.
An operator with access to a laptop or mobile device can monitor a patient’s environment through the robot grabber’s camera feed and, when needed, use it to remotely perform tasks.
In addition to helping hospital staff, the robotic grabber is designed to provide better, more efficient support to anyone receiving care at home.
How a hospital visit inspired a new type of robot
A relative of Kunikatsu’s needed long-term hospital care for several months, during which time they were confined to bed. The hospital’s busy staff did not have the time to help his relative with routine tasks, so they if they wanted a book or other nearby object brought to them, they had to wait a very long time for help.
After hearing about this problem, Kunikatsu realized that a remotely operated robotic grabber would be the perfect solution for this type of situation. He came up with a design that could be controlled online using a laptop or mobile device and requires no specialist expertise to control. While originally inspired by his relative’s hospital stay, Kunikatsu realized the Robot Grabber would be extremely useful for helping people receiving care at home.
For example, if a patient needs to be brought their medication every evening, the robot grabber could be used to pick up the medication and bring it to the patient’s bedside. Each time the Robot Grabber is operated remotely could potentially save a home visit by a care worker. Kunikatsu estimates that if the Robot Grabber saved at least one home visit per worker per day, it would improve efficiency by at least 10%. This would reduce costs, allow carers to reach more people, and help care receivers remain in their own homes for longer.
Rethinking robotic arms for non-expert operators
Modern automated robotic arms typically have six joints (known to roboticists as “degrees of freedom”). This allows an arm to assume a wide variety of positions, which increases its usefulness.
Kunikatsu wanted an arm that could be controlled intuitively, however, even by untrained operators working remotely. He decided to create a new robotic arm with a video feed to guide it and just three degrees of freedom (making it easier for carers to make quick corrections).
Kunikatsu chose to power the Robot Grabber with a Raspberry Pi computer running software running on Python and C++ because of its small size and cost. The camera is mounted to allow the operator to see the area in front of the Robot Grabber, as well as the robotic hand, as it handles objects.
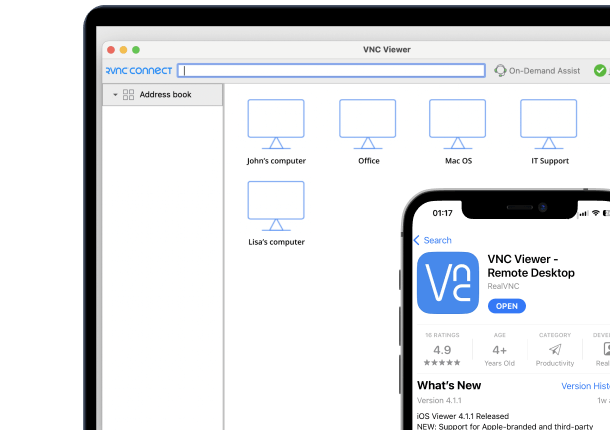
RealVNC Connect is used to display the video feed on any device, as well as relay commands remotely from the operator to the Robot Grabber.
Explaining his decision to use RealVNC Connect, Kunikatsu said:
“It provided a fantastic interface for the situation from the very first time I used it. I knew then that RealVNC Connect would be good for someone with minimal training to operate the Robot Grabber. Because it allows connection to the internet, using RealVNC Connect also means the Robot Grabber can be accessed from virtually anywhere.”
Integrating visual processing with a robot is outside of Kunikatsu’s expertise, so he asked his friends Hironobu Takahashi and Takashi Yoshimi to assist with this process. Together they are hoping to improve the functionality of the Robot Grabber, allowing it to perform more tasks. Soon they hope it will be able to operate microwave ovens and retrieve items from inside refrigerators. Eventually, they would like the Robot Grabber to respond to high-level commands (i.e., “Get medication”), allowing it to perform tasks without the need for an operator to control every movement.